

By X. F. Wang, J.-F. Chen, Z.-G. Shi, and K. S. Chen
Abstract:
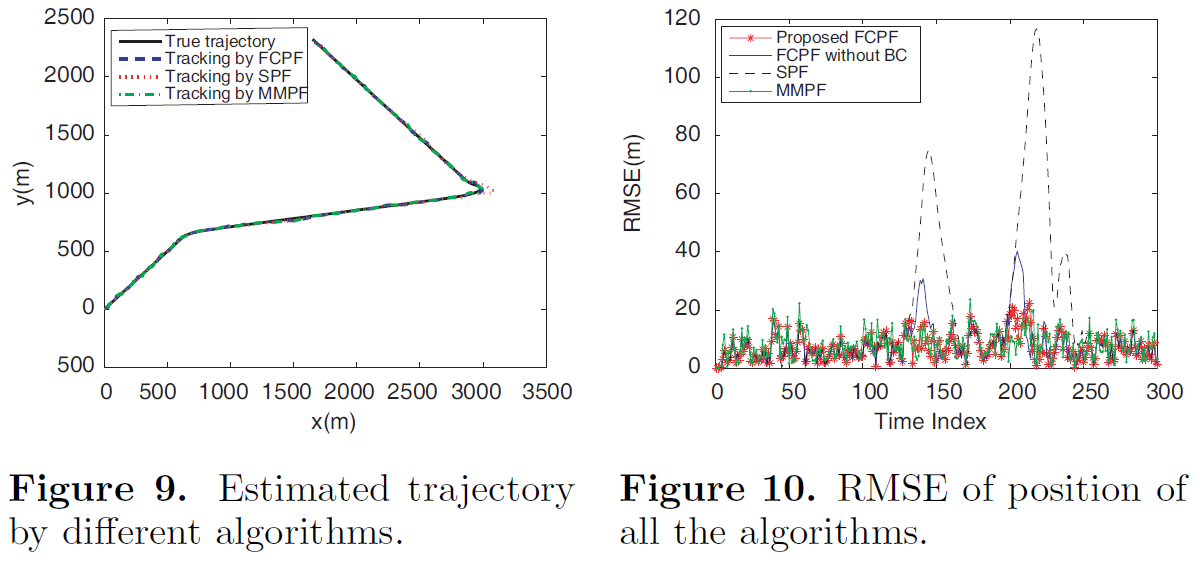
In this paper, we propose a novel fuzzy-control-based particle filter (FCPF) for maneuvering target tracking, which combines the advantages of standard particle filter (SPF) and multiple model particle filter (MMPF). That is, the SPF is adopted during non-maneuvering movement while the MMPF is adopted during maneuvering movement. The key point of the FCPF is to use a fuzzy controller, which could imitate the thoughts of human beings in some degree, to detect the target’s maneuver and use a backward correction sub-algorithm to alleviate the performance degradation of MMPF caused by detection delay. Simulation results indicate that the proposed algorithm has a much better tracking accuracy than the SPF while keeps approximately equal computational complexity. Compared with MMPF, both algorithms have no tracking lost, but the tracking accuracy of the proposed FCPF is a little better than the MMPF, and the FCPF consumes about 66% computation time of the MMPF. Thus, the proposed algorithm offers a more effective way for maneuvering target tracking.
Citation:
X. Wang, J.-F. Chen, Z.-G. Shi, and K. S. Chen, “Fuzzy-control-based particle filter for maneuvering target tracking,” Progress In Electromagnetics Research, Vol. 118, 1-15, 2011.
http://www.jpier.org/pier/pier.php?paper=11051907
此文虽水,实在来自不易啊,从二师兄这里接手来到现在快一年了。。。历经中文版悲剧,JZUS-A悲剧,终于又修改一个多月,被孔金瓯老先生的杂志PIER相中!!!
